Nach ein wenig probieren und googeln, nachdem das nichts wurde (Eine Woche im Labor ersetzt den Tag in der Bücherei, oder wie ging der Spruch noch mal...): Die 2.4 Ghz Frequenz ist gar nicht so leicht abschirmbar, und Richtfunkantennen zu groß, mit der Funkpeilung wird also nichts.
Die Peilung per Magicmap kann anscheinend auch nur Räume unterscheiden, ist damit auch nicht verwendbar.
Im Rennen bleibt damit vor allem das GPS-System, vor allem, da wir nur Richtungsanzeigen brauchen und damit der Positionsoffset bei Sucher und zu Suchendem grösstenteils gleich ist. Nachteilig dabei ist, das dann auch ein Digitalkompass verwendet werden muss (gleiches gilt für die UbiSense-Lösung, die wir zum Ausprobieren verwenden), so das die Anzeige per (magnetisch bewegtem) Pfeil wegfällt - zumindest dürfte das sonst den Magnetkompass ein wenig verwirren.
Damit bleibt fürs erste die Anzeige mittels LED-Kreis. Ein erster Prototyp zum Testen:

Später kann das Poti als recht klobiges Bauelement auf die Rückseite verlegt werden und die gesamte Elektronik gegenüber dem Armband verdreht werden, so das ein einfaches Austauschen der Hülle möglich ist. Ausserdem kann ein noch freier Analogeingang mit der Hülle verbunden werden, so das zwei Armbänder miteinander kommunizieren können, um z.B. einen anderen Freund einzuspeichern.
Bisher sieht der Versuchsaufbau also so aus: Über das UbiSense-Modul kann der entsprechende Server die Position des Armbandes bestimmen und sendet dieses über xBees an alle Teilnehmer. Diese können dann aus ihrer und der Position der zu findenen Person die Richtung bestimmen, in der sie ist, welche dann mit den Kompassdaten zum Anzeigesignal verarbeitet werden und damit die entsprechende LED aufleuchtet. Die zu findenen Ob- und Subjekte können dabei über ein Poti ausgewählt werden. Eine Stellung dient dabei später zum Einspeichern neuer Freunde und eine weitere nutzt den LED-Ring als Uhr.
Insgesamt wird der Aufbau allerdings aufgrund des zu verwendenen GPS-Moduls (bzw. UbiSense-Moduls), eines Digitalkompasses und schliesslich des xBee-Moduls recht teuer und auch verhältnismässig groß.
Eine einfache Alternative wäre dann einfach nur ein xBee-Modul in Kombination mit dem Arduino zu verwenden, und das Arband als Leuchtring zu gestalten. In diesem Fall sendet man einfach nur die Frage "wo seid ihr" und die Armbänder der angesprochenen leuchten auf (und vibrieren im Idealfall). Die Positionssuche geschieht dann optisch, indem die Angesprochenen dann mit ihren leuchtenden Armbändern winken oder örtlich durch laufen zu einem vereinbarten Treffpunkt :-).
Um das xBee-Modul und den Arduino dann wenigstens etwas zu fordern, kann man dann natürlich auch wieder Einfachbotschaften senden oder hübsche graphische Effekt (Farbwechsel etc) machen. Ausserdem könnte das ganze zusammensteckbar aus Anzeigemodulen aufgebaut werden (bastel dir dein Wunscharmband :-)

So sieht das zwar noch hübsch hässlich aus, aber man kann das ja noch optimieren: Das Band wird ja maximal so breit wie das xBee Modul als breitestes Bauelement. damit ist noch über und unter der LED-Matrix zur Anzeige des "anrufenden" Namens noch platz für hintergrundbeleuchtete Schnörkel, die sich dann über das ganze Armband als Rahmen hinziehen. Abgesehen vom xBee kann sich das Band dann auch verjüngen und kleiner Symbole für Fixbotschaften enthalten, die dann durch Taster (das Potis zu klobig sind) ausgewählt werden.
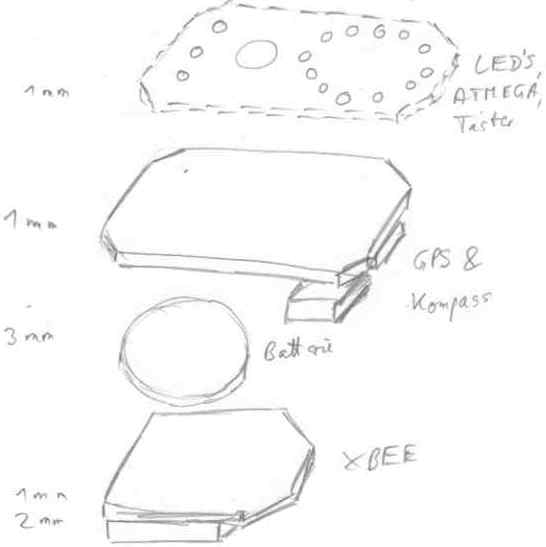
 Das reale Version wird ja etwas kleiner, die Gehäuse sollen dann beispielsweise wie folgt aussehen:
Das reale Version wird ja etwas kleiner, die Gehäuse sollen dann beispielsweise wie folgt aussehen: